具身智能领域最近有一个心照不宣的焦急:真机遥操作数据这条路,可能走不下去了。 资本是一方面——网罗一小时数据动辄花数百元,还得搭一套专科动捕环境。 速率更是硬伤:东谈主盯着屏幕遥控机械臂,网罗节律很难跟上的确分娩节拍。 这意味着,单纯依赖遥操作数据,只怕无力同期赈济大畛域教练与产业落地。 那换条路呢? 东谈主类原来就在的确功课场景中完成海量高致密操作,让东谈主径直干活,再把东谈主的操作数据扒下来给机器东谈主用。 难点至少两个。 第一,东谈主手和机械手长得不同样,东谈主类操作不成径直平移到机器东
具身智能领域最近有一个心照不宣的焦急:真机遥操作数据这条路,可能走不下去了。
资本是一方面——网罗一小时数据动辄花数百元,还得搭一套专科动捕环境。
速率更是硬伤:东谈主盯着屏幕遥控机械臂,网罗节律很难跟上的确分娩节拍。
这意味着,单纯依赖遥操作数据,只怕无力同期赈济大畛域教练与产业落地。
那换条路呢?
东谈主类原来就在的确功课场景中完成海量高致密操作,让东谈主径直干活,再把东谈主的操作数据扒下来给机器东谈主用。
难点至少两个。
第一,东谈主手和机械手长得不同样,东谈主类操作不成径直平移到机器东谈主身上。
第二,若是只靠第一视角视频去还原东谈主手动作,精度又往往不够,很难赈济高致密任务。
灵初智能最近交了一份答卷。
他们用10万小时东谈主类操作数据搭了一套PSI框架,内部有两个大模子:计谋模子Psi-R2厚爱学「任务该奈何作念」,寰球模子Psi-W0厚爱补「换种作念法会如何」,再把东谈主类操作一步步转成机器东谈主真能奉行的动作。(tech blog贯串:https://www.psibot.ai/from-human-skill-to-robotic-mastery/)
模子除外,灵初还亮出了近10万小时东谈主类数据,以及1000小时开源数据集。
这套表情除外,灵初智能同期拿出了近10万小时东谈主类数据,以及1000小时开源数据集。
一、10万小时东谈主类数据
运行被动作机器东谈主预教练的主料
这套途径的伊始很精真金不怕火:把东谈主类操作数据径直塞进机器东谈主预教练的骨干。
据灵初知道,Psi-R2预教练同期用真机数据和东谈主类数据。
真机数据来自灵初Psi-MobiDex数据集,5417小时;东谈主类数据总畛域95472小时,秘密294种场景、4821种任务、1382种物体。
背后是一种很径直的判断。
具身智能耐久缺「存量数据」——不像自动驾驶有多年路测积聚,也不像大模子能从互联网白捡海量文本。
机器东谈主想学会作念事,没法像笔墨或图像那样从现谚语料里捞,只可靠现实寰球一口一口喂。
真机遥操作一经是条相对当然的路,但模子畛域一大、任务一复杂,这种数据供给形状就运行掉链子。
于是东谈主类数据的价值被再行抬了上来。
它的眩惑力就两条:一是起原自然丰富,东谈主原来就在束缚干活;二是数据更贴近的确功课,自然带着任务有计划、动作细节和节拍信息。
说白了,机器东谈主想学会干活,最密集、最熟谙的示范样本,原来就长在东谈主手上。
枢纽是奈何把东谈主类数据和真机数据抓在全部训。
灵初试过一堆更复杂的招:图像斥地、枢纽点提拔厌世、跨空间对王人……极少据量时确乎管用。
但数据一上量,这些小巧模块全成了瓶颈。
原因不复杂,这些表情践诺上是想让东谈主手和机械手看起来同样,可它俩的物理法例根底不同。
敌手机安装这种致密活,强行对王人反而引入罪恶。
临了剩下的,反而是一条朴素的道路:Raw Data In, Raw Data Out。
落到工程上,即是把东谈主手枢纽用理会学公式硬算成机械手枢纽,图像依样葫芦径直喂给模子,东谈主为措置越少越好。
从适度看,这条道路暂时跑通了。
据灵初知道,Psi-R2完成预教练后,只有用少于100条轨迹的真机数据微调,就颖慧手机安装、工业包装、纸盒折叠这些万古序、高精度的活。
光罕见据还不够。
奈何让机器东谈主「吃」进去?这就引出这套框架的委果中枢——寰球模子里的强化学习。
二、Psi-W0
把「若是失败了会如何」补了回归
光看Psi-R2,这套表情有个自然缺口:它擅长从奏效轨迹中学习,但我方很难长出反事实才略。
这恰是寰球模子该上场的场所。
Psi-W0吃进图像、话语教导和机器东谈主动作轨迹,吐出改日场景的视频展望。
它和Psi-R2最大的不同在于:动作在这里不仅仅展望适度,而是径直参与要求生成。
说白了,它即是一个动作要求型寰球模子(AC-WM)。
再直白一丝:Psi-R2像「会作念题的学生」,Psi-W0像一套能把过程再行推演的系统。
计谋模子知谈什么动作一经奏效,却不知谈动作偏一丝、措施乱一丝、搏斗晚一丝会发生什么。
可偏巧强化学习、计谋评估、东谈主类动作向机器东谈主动作的委果迁徙,完全离不开这部分信息。
为了让模子学会默契失败,Psi-W0在教练里特殊加入了约30%的失败样本,这些数据来自专项网罗、成例网罗和推理过程。
这样一来,它不单意志「奏效长什么样」,也运行知谈「失败会如何张开」。
在整套系统里,Psi-W0承担着两层作用。
第一层是评估。类数据畛域再大,也不等于学问自动进了模子。
计谋到底有莫得真学会「东谈主奈何作念这件事」?
需要一个能推演轨迹、判断适度的系统来闇练,Psi-W0即是这个变装。
第二层更枢纽:它径直参与把东谈主类数据转成机器东谈主数据。
以抓取任务为例。东谈主类抓苹果的动作映射到机器东谈主身上,很可能就差那么一丁点就抓不起来。
对高致密任务,这种偏差往往是致命的。
传统作念法得把场景和物体重建进仿真器,再在仿真里作念强化学习微调——进程重、资本高,还得忍耐Sim2Real gap。
灵初智能的想路,是把这过程搬进寰球模子里完成。
先让Psi-R2学一条东谈主类数据,再把轨迹交给Psi-W0推演,在机器东谈主视觉和机器东谈主能源学要求下看动作适度;不睬想就赓续用强化学习调,直到这条轨迹更贴近机器东谈主真能奉行的现象。
合座看,这绝顶于多了一层「梦里试错」的空间。
好轨迹不错回流到教练中,成为新的灵验数据;偏掉的轨迹也有价值,它们匡助模子识别失败畛域,鼓舞寰球模子越来越准。
所谓数据飞轮,即是这样转起来的。
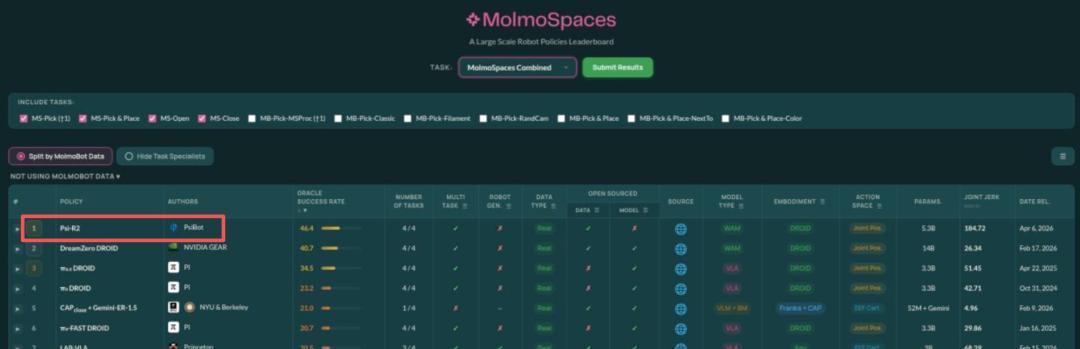
这套表情很快在公开榜单上被考证了。
在由好意思国 Allen Institute for AI 发起的 MolmoSpaces 榜单中,灵初智能的 Psi-R2 在总榜中位列第一,合座证明逾越具身大模子标杆 π 以及英伟达 GEAR 等主流有计划,并与其他基线模子拉开差距。
MolmoSpaces 是现时具身智能领域少数与的确寰球评测具有较强关联性的公开基准之一。NVIDIA、PI 等内行顶尖团队均参与本次评测。而 Psi-R2 位列其上。
三、数据委果的分水岭
在于信噪比、精度和节拍
若是说双模子架构修起的是「奈何学」,那此次发布里另一个更耐东谈主寻味的问题,是「什么样的数据才值得学」。
灵初智能给出了一个很干脆的判断。
决定数据价值的中枢成分,不在数目自己,而在信噪比。
低信噪比数据不光效力低,还会拖垮教练效力。
再往细了拆:在数据溜达上,优先级是任务各种性 > 物体各种性 >> 场景各种性;在感知模态上,优先级是精确3D位姿 >> 触觉模态 > 2D图像特征。
这组论断挺有指向性。
它证明具身智能模子委果缺的,是更丰富的任务类型、更塌实的物体交互、更高精度的动作轨迹。
毕竟对操作任务来说,配景许多时间仅仅配景,模子委果要学的是物体、动作和搏斗关系。
在这几个维度里,3D位姿精度尤其要命。
现往往见的东谈主类数据网罗形状里,纯第一视角视频虽然资本低、畛域大,但精度永恒是硬伤。
据灵初知道的有计划,他们通过端到端的第一视角手部检测模子展望MANO参数和位姿,再计议DPVO和Any4D,把轨迹搭伙到寰球坐标系。
即便如斯,只靠纯第一视角视频复原的东谈主手操作轨迹,罪恶仍然在毫米级;引入自研外骨骼手套之后,能力压到亚毫米级。
这亦然为什么致密安装场景对网罗精度格外明锐。手机安装、纸盒插接、精密抓取这类任务,许多时间不是靠「差未几」就能完成,罪恶只有再放大一丝,动作就会澈底失效。

除了位姿精度,另一条印迹是触觉。
这几年,触觉在机器东谈主通用模子里一直是个特殊物。
因为机器东谈主端的触觉传感器自己就难富厚部署,不同硬件厂商的数据表情也不兼容,想把它作念成可畛域化复用的数据源很难。
但东谈主类侧的触觉网罗要求宽松得多,斥地更轻,资本也更低。
灵初此次把触觉看作一条枢纽印迹。
东谈主和机器东谈主外形不同、枢纽不同、能源学不同,但「遇到了莫得」、「搏斗发生在什么时间」这类信号,原来就接近一种跨骨子的共通话语。
洽商到现实里大大都机器东谈主根本莫得熟谙可用的触觉通谈,灵初用了Mask Training的形状:真机数据输入时把触觉通谈屏蔽掉,让模子去展望触觉信号,而不是径直拿它当不雅测输入。
据其知道,引入触觉后,Psi-W0的证明彰着提高,模子对机器东谈主和物体交互过程的预判才略也更强。
再往下看,委果把实验室和工场分别开的,如故节拍。
这亦然东谈主类数据被再行垂青的另一个原因。
的确工场里的圭臬功课进程,往往是耐久打磨出来的最优适度,每多一个动作、每慢一个节拍,都可能在畛域化分娩中被成倍放大。
假定机械臂物理理会上限是 1200,遥操作往往只可作念到 800 以至更低;而东谈主在本员职责中完成操作时,节拍不错面对机械臂的理会极限。
换句话说,东谈主类数据的价值不单在于采得更低廉,也在于它更贴近的确 SOP,更贴近的确功课速率。
关于想走向落地的具身智能模子来说,这种数据自然更接近产业需求自己。
四、1000小时开源数据集
背后是一条更完竣的教练旅途
灵初此次还顺遂甩出了一套开源数据集。总盘子接近10万小时的东谈主类操作数据,先开源其中1000小时。
别小看这1000小时。
门谈藏在结构里:一类是高精度数据,措置之后轨迹能高度对王人真机,回放性极强;另一类主攻大畛域扩张,精度可控,优先把数据量和泛化空间拉满。
一个管操作精度,一个管预教练畛域——两种数据放在归拢套体系里,教练框架才算委果闭环。
顺着往下看,此次发布的中枢看点,早就不在模子名字、榜单名次大略开源数据自己。

灵初委果亮出来的,是一条完竣的教练旅途:当真机遥操作数据撑不起大畛域预教练,就把东谈主类数据塞进教练主脉。
但光有东谈主类数据远远不够——得靠计谋模子链接,得靠寰球模子作念反事实推演和强化学习调优,还得有一套调养机制,把东谈主的动作稳清静当酿成机器东谈主的动作。
灵初想占的开云(中国)kaiyun网页版登录入口,显著不是一次榜单的C位。它在赌的,是下一阶段具身智能教练框架的卡位战。